map
A map models a searchable collection of key/value pairs
- Multiple entries with the same key are not allowed (keys must be unique)
Operations
Main map operations
- INSERT(M,k,v): add a pair (k,v) to map M
- DELETE(M,k): remove key k and its value from map M
- SEARCH(M,k): find a pair with key k in map M
Auxiliary map operation
- MAP-EMPTY(M): test whether no key/value pairs are stored in map M
Implementation
List-based
We can implement a map M using an unsorted doubly-linked list

Performance
- INSERT takes O(1) time (O(n) if we first check for duplicates)
- SEARCH/DELETE take O(n) time since in the worst case (the item is not found) we traverse the entire list to look for an item with the given key The list-based implementation is efficient only for maps of small size
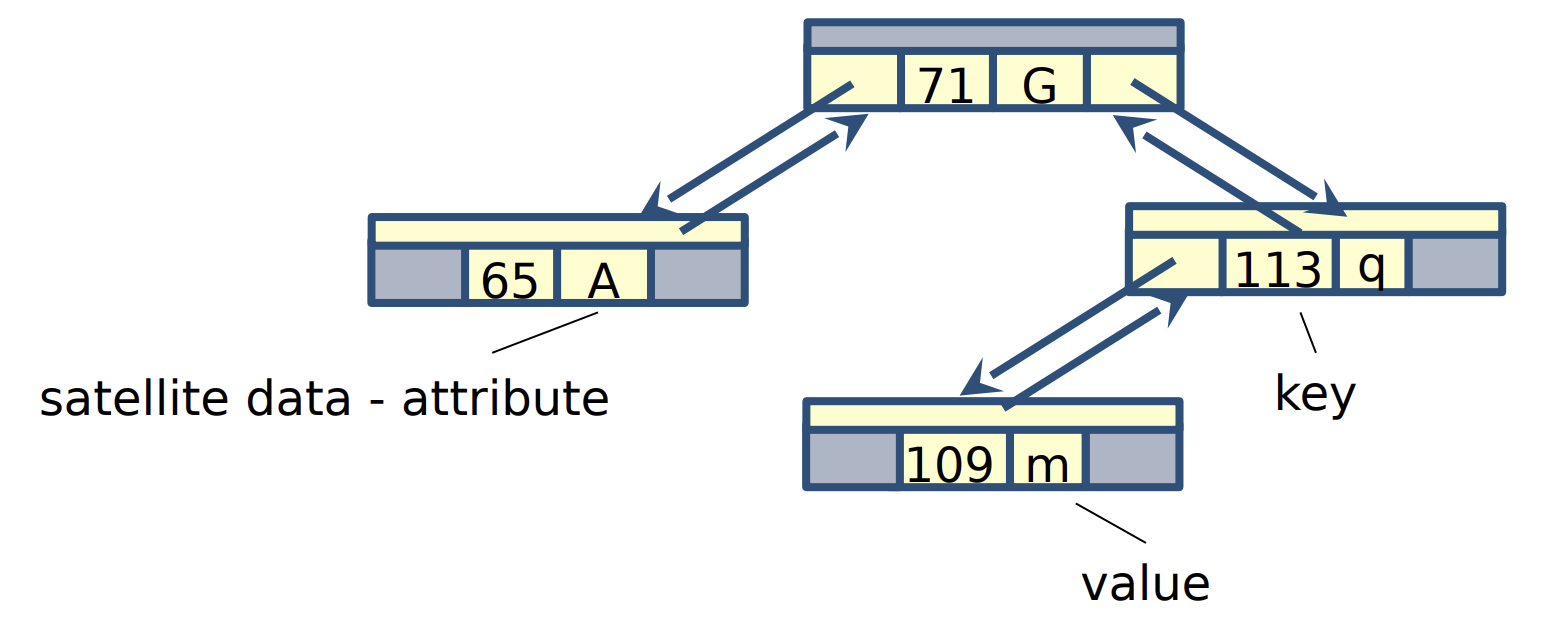
Tree-based
Self-balancing trees guarantee a worst-case time complexity of O(log n) for all the main operation of the Map ADT
- inorder traversal allows us to get a sorted sequence of all the pairs stored in the map
Direct Access Table
We use an array or direct-address table T[0,..,m - 1] to represent the map
- Each position (also called slot or bucket) in T corresponds to a key in the universe U
- Slot k points to to an element in the map with key k
- If no element has key k, then
T[k] = NIL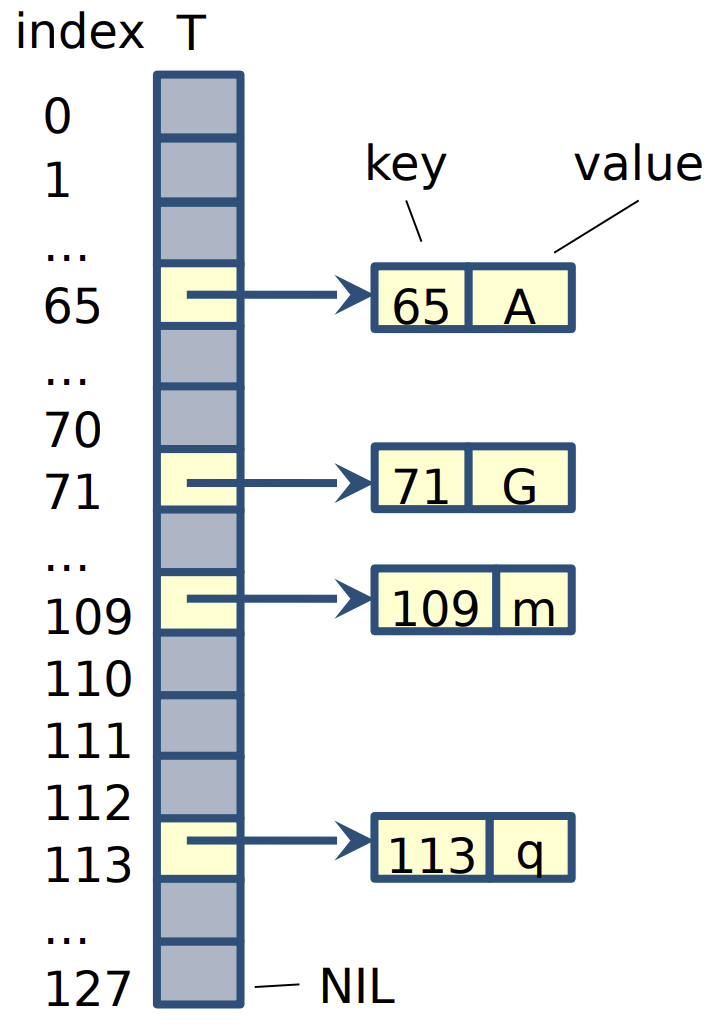
Operations
Each operation takes O(1) time The best time for any implementation